
As great as it is to finish a professional-looking hardware project with optimum component choices and full design documentation, I love the feeling of sketching in hardware (or as I’ve called it in the past, improvisational electrical engineering). Despite all the faults and rough edges in today’s development tools, we do live in a world now where it’s easy turn an idea into a working prototype with very little time and money.
Flying in the dark
Yesterday’s hardware sketch was a light system for my helicopter, an E-Flite Blade CX2. I wanted:
- A way to fly at night. Real navigation lights would be nice, but for starters I just want the whole helicopter body to glow.
- A way to take off and land safely. I’ve flown with only a body light before, and it’s really hard to land when you don’t know quite where the ground is.
- A bright strobe, for extra visibility and attention.
- A way to control the lights remotely, using the extra servo channel on the Blade CX2’s radio.
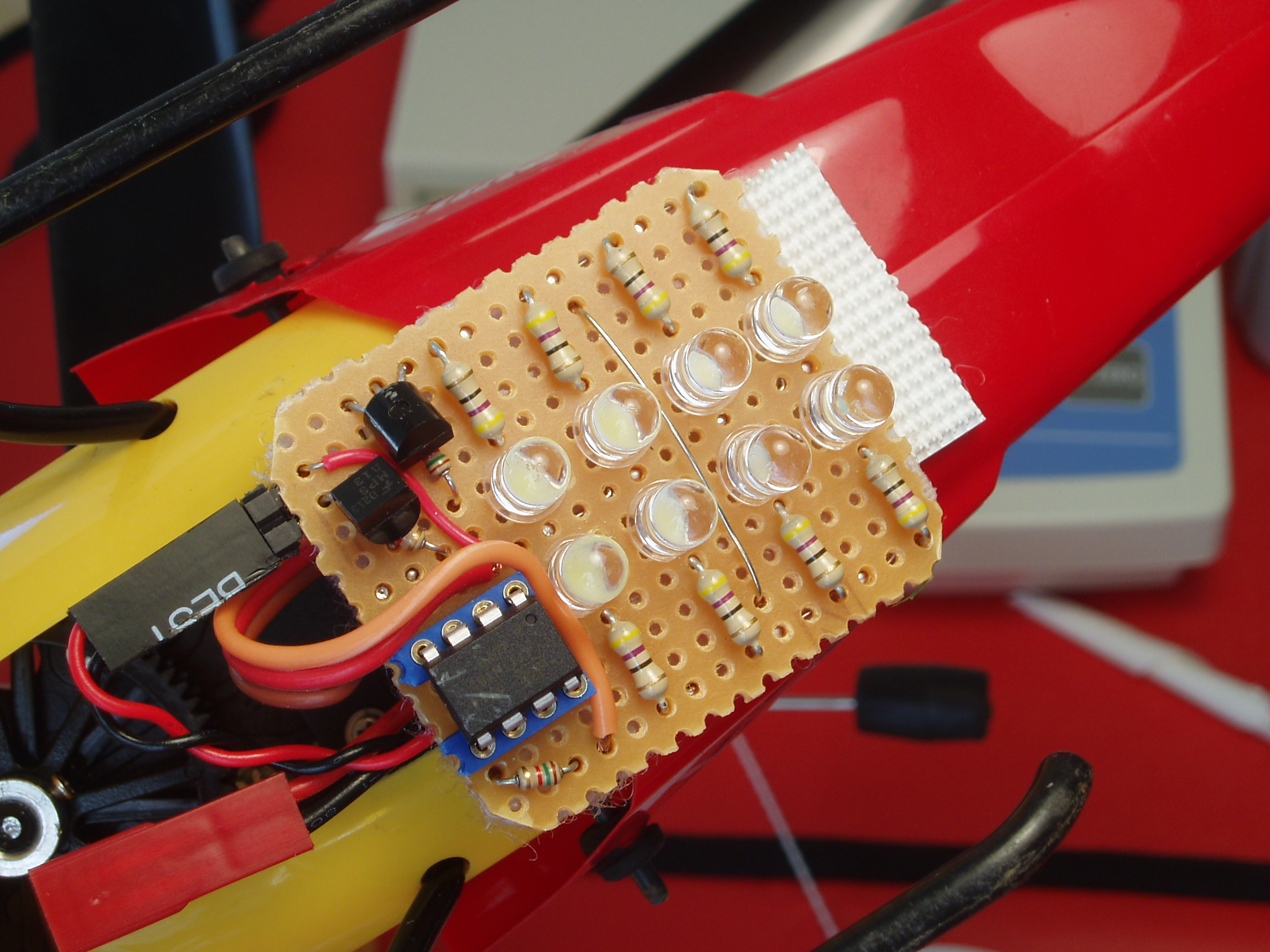
My finished prototype takes the form of a small circuit board that attaches under the canopy with velcro. That board holds the light control electronics, plus a bright white searchlight. It connects to the radio (for power and control) and to the internally-mounted body lights. The body lights are just bare LEDs attached to the inside of the tail and canopy with velcro. One white LED in the tail, one red and one yellow LED in the canopy.
Both sets of lights have full brightness control using a single knob on the BCX2’s transmitter. At the knob’s minimum setting, all lights are off. As you turn it up, first the body lights fade on. Next, the searchlight fades on. Just before hitting the maximum setting, all the lights are on at full brightness. If you turn the knob farther, to its maximum, the searchlight goes into strobe mode.
There are some rough edges, but it works remarkably well for such a simple design. The total weight is about 15 grams. It’s heavier than I’d like, but it doesn’t effect flight performance much. I’d still like some orientation lights mounted on the skids or the sides of the control PCB, but the body light is pretty easy to fly by. The searchlight is incredibly visible at maximum brightness. Even from an altitude of 50 feet or so, the light casts a bright spot on the ground.
Technical details
Skip this section unless you’re a huge dork 😉
The light controller uses an Atmel ATtiny85 microcontroller (kind of overkill) and a pair of NPN Darlington transistors to drive the LEDs. The microcontroller’s firmware (navi-misc/rc/light-dimmer/main.c) is quite simple. An assembly-language loop times the pulses coming in from the radio, then the firmware decides on a corresponding lighting mode and sets up the AVR’s hardware PWM peripheral accordingly.
This hardware sketch was built with whatever parts I had handy. The LEDs are low-tech by today’s standards, the microcontroller was kind of overkill, and MOSFETs would have been better than the Darlington transistors. If I were building a second revision of this, I’d make a few improvements:
- All surface-mount parts and a PCB, to decrease size and weight.
- Use a single 1-watt Luxeon LED instead of an array of cheapo white LEDs.
- To drive the Luxeon LED, I’ll probably want a simple buck converter.
- Logarithmic LED brightness control, rather than linear.
- Side-emitting navigation lights, mounted directly on the main PCB.
- Optimize the firmware for low-power operation when the lights are off. Right now it costs about 8mA to run the AVR in its pulse-detecting loop at 8 MHz.
- Start mass-producing and selling these 😉 It’s much better than any commercial light kit I’ve seen for the Blade CX2, and the parts are quite cheap.