
Tag: Sewing Machine
-
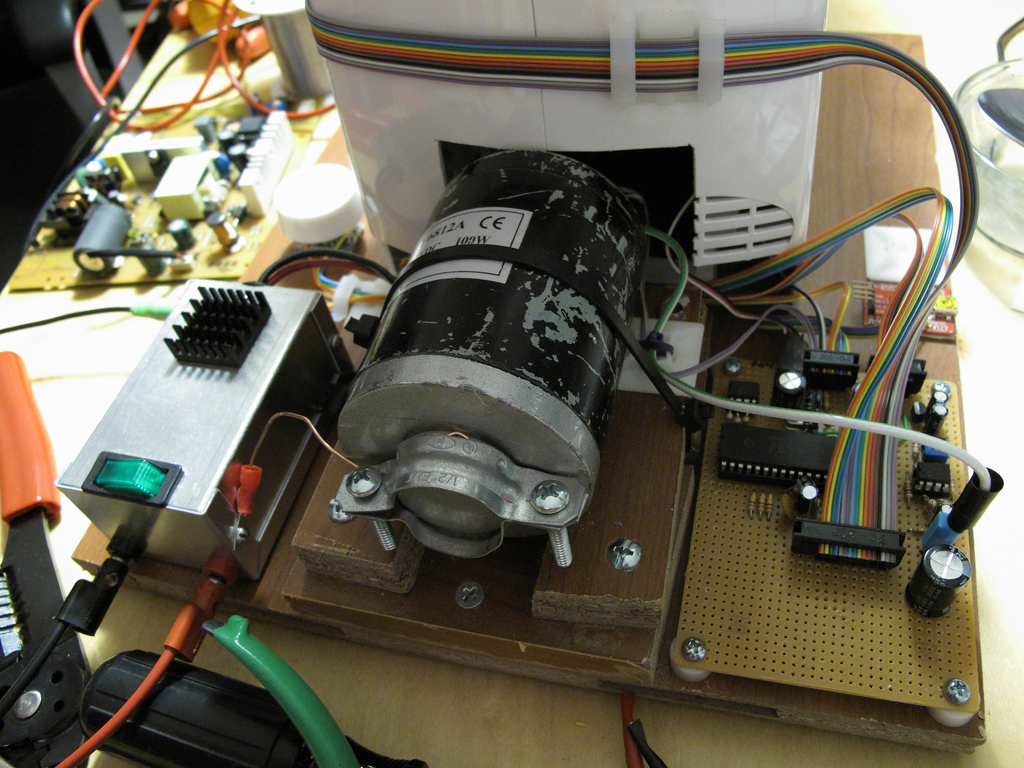
scanlime052 – Sewing Servo Mess
Finally debugging an old project. It’s a mess but we can work with this.
-
Sewing Machine EMI Woes
I think I got my sewing machine to stop randomly rebooting! (Yes, I am a huge dork…) This isn’t the first time I’ve delt with EMI problems in my hobby projects, but this one actually turned out to be a lot more annoying than the others. This project has no really high-frequency signals, no super-wide…
-
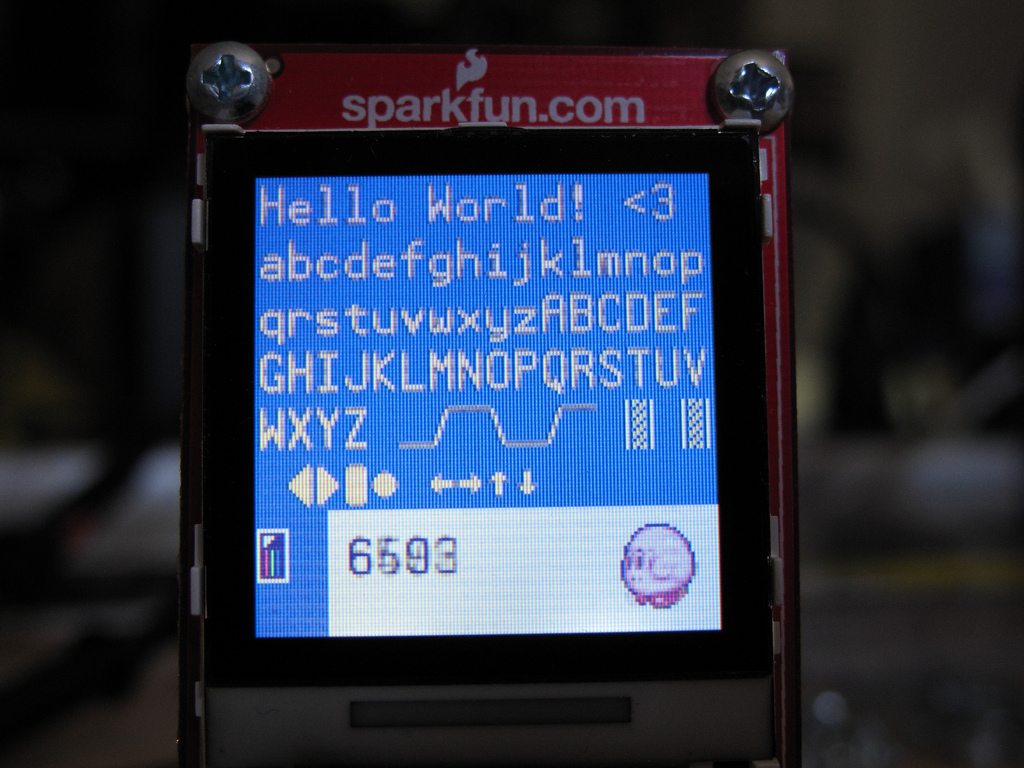
Sewing Machine Update: LCD
I had a rather cute 128×128 Nokia 6100 knockoff LCD that I wanted to use with the project. It’s inexpensive, not a bad quality/price tradeoff, and they’re pretty easy to interface with. Spark Fun already has plenty of drivers on their page for different microcontrollers. But of course, not a Propeller. And after searching through…
-

DIY Sewing Machine Retrofit
The story behind this project is a bit overcomplicated. That’s all below, if you’re interested. I made a video to explain the final product: Back Story This all started when I bought a sewing machine for making fabric RFID tags a little over a year ago, and started using it to make cute plushy objects.…