
Tag: propeller
-
Cheap and easy Android to Propeller bridge
This is a quick plug for a spiffy project that M. K. Borri (spiritplumber) has been building using my usb-fs-host object. He’s connecting an Android phone to a Propeller microcontroller, emulating the ADB debug protocol on the µC, and using this as a communication bridge in order to control robots from the phone. He has…
-
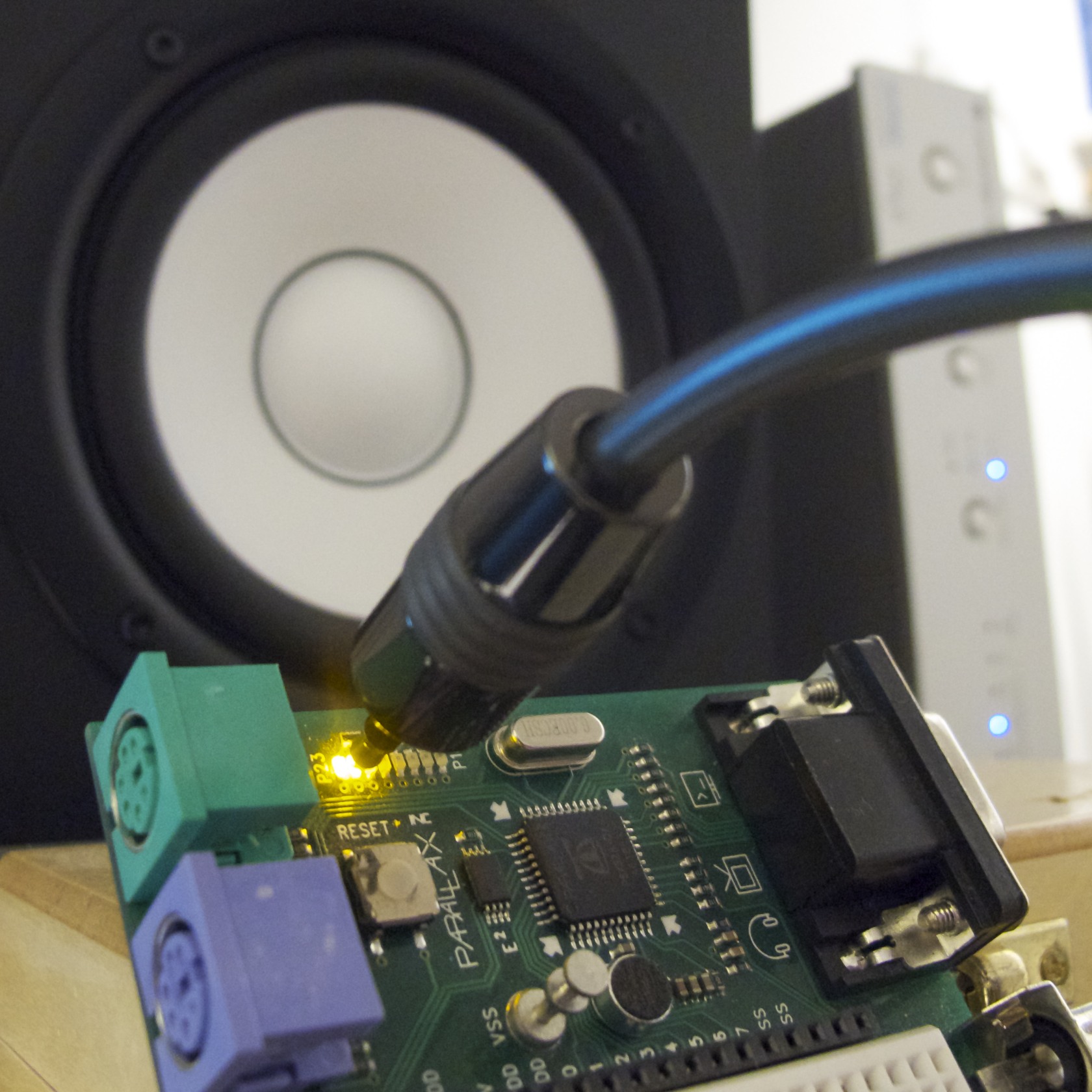
S/PDIF Digital Audio on a Microcontroller
A few years ago, I implemented an S/PDIF encoder object for the Parallax Propeller. When I first wrote this object, I wrote only a very terse blog post on the subject. I rather like the simplicity and effectiveness of this project, so I thought I’d write a more detailed explanation for anyone who’s curious about…
-
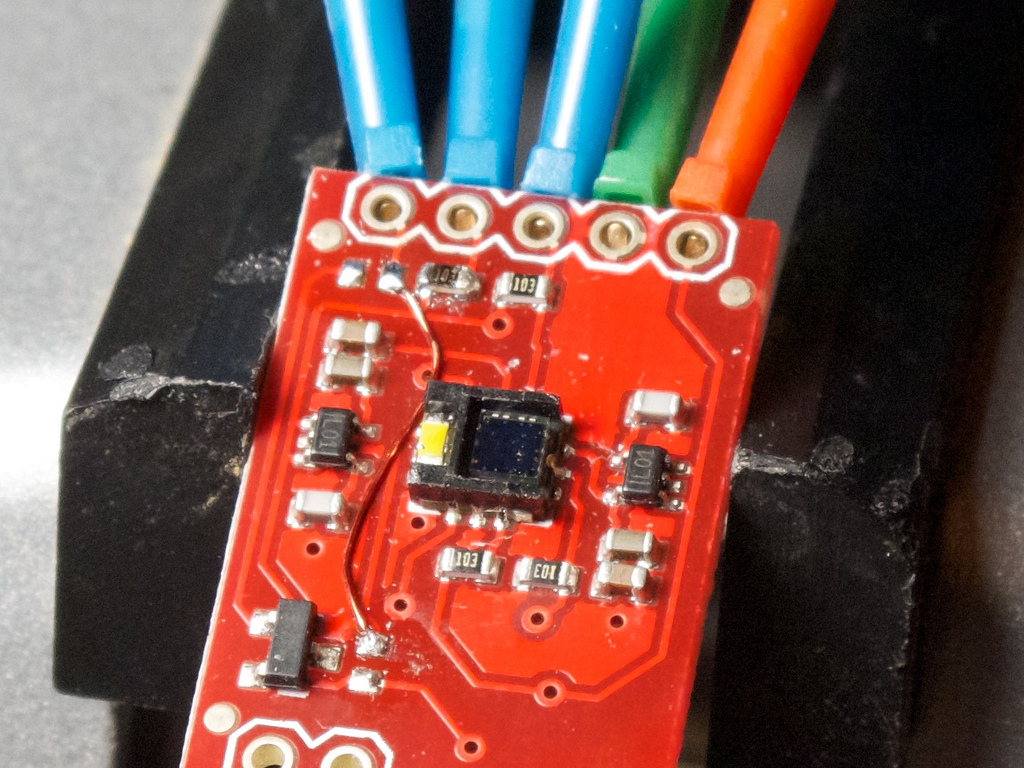
Trying out the Avago ADJD-S371-Q999 Color Sensor
This is another sub-experiment leading up to a project that I’ve only tangentially mentioned on this blog so far: a robot that automatically sorts and places Perler Beads. The robot starts with a pile of unsorted beads, and after it separates them into single beads, it needs a way to accurately sense the color of…
-

Propeller Bluetooth Stack Demo
After going months without a lot of time for working on my hobby projects, I finally had a few free days to work on debugging my embedded Bluetooth stack for the Propeller. I got it working well enough to demo a Serial Port Profile device, implemented using only a Propeller Demo Board and a $2…
-

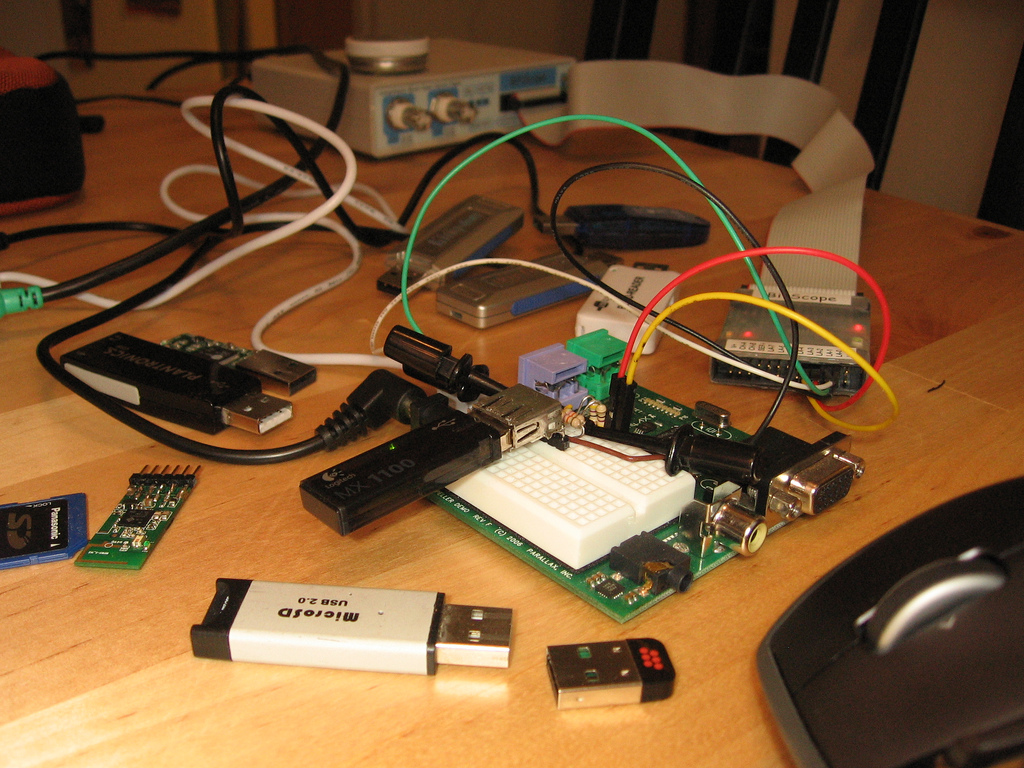
Embedded Bluetooth for $2
This is a continuation of my experiments in bit-banging full-speed USB on the Propeller. I have the basic host controller working reasonably well now, so I started trying to do something a bit more “useful” with it by implementing a simple Bluetooth stack on top of it. Bluetooth and USB are both quite complicated, and…
-
It’s Alive: Bit-banging full-speed USB Host for the Propeller
I’d like to make a more detailed post about this once the project is a bit further along… but for now just a brief description and a couple teaser photos 🙂 This is one of those things that people have said was impossible, and I’ve wanted to try it for a while. I finally found…
-

Hacking a Digital Bathroom Scale
People all around the internet have been doing cool things with the Wii peripherals lately, including the Wii Fit balance board. Things like controlling robots or playing World of Warcraft. But what if you just want one weight sensor, not four? The balance board starts to look kind of pricey, and who wants to deal…
-

DIY Sewing Machine Retrofit
The story behind this project is a bit overcomplicated. That’s all below, if you’re interested. I made a video to explain the final product: Back Story This all started when I bought a sewing machine for making fabric RFID tags a little over a year ago, and started using it to make cute plushy objects.…
-

Turbulence
For anyone who hasn’t already seen it, Linus Akesson (of Craft fame) just released his first demo for the Parallax Propeller: Turbulence. You can watch the high resolution video on capped.tv, with an introduction by Linus himself. Or, if you have a Propeller board, he’s provided binaries and source code. The demo is quite impressive,…
-

RFID Garage Door Opener
Today I finished a major update to my software-only RFID decoder for the Propeller microcontroller, and I finally installed my prototype in the garage. Now I can open the garage door with my RFID badge from work, while I’m on foot or on my bike 🙂 I’ll post some pictures once there’s some sunlight.
-
Simplest RFID reader?
That’s a Propeller microcontroller board with a few resistors and capacitors on it. Just add a coil of wire, and you have an RFID reader. Here’s a picture of it scanning my corporate ID badge, and displaying the badge’s 512 bits of content on a portable TV screen: If you’re into that sort of thing,…
-
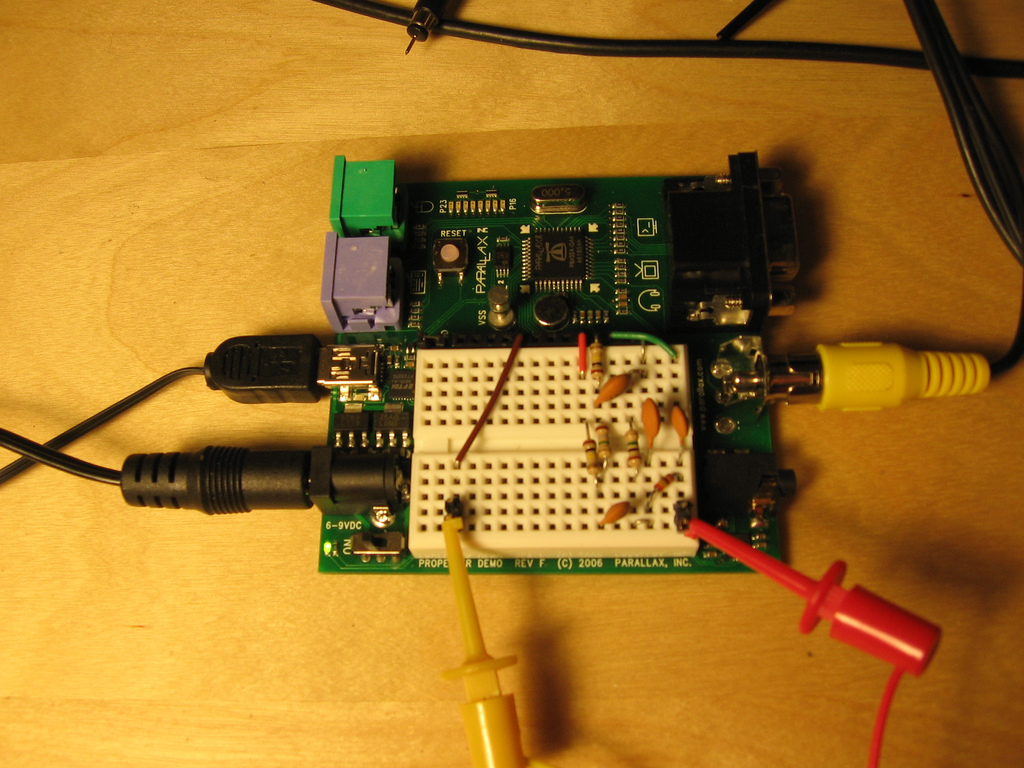
Propeller chip + SPDIF = ???
So, kind of on a random whim, I decided to build a software SPDIF encoder for the Propeller chip. It was an interesting challenge, and the results are pretty cool, but now I have no idea what do do with it. Not an uncommon problem for me, I guess… Maybe I’ll give my Propeller board…
-

Playstation controller extender
The little hardware project I started almost 2 months ago is finally done. Completely finished. Bug free! Well, almost. It is, however, in a fully assembled state with firmware that is actually pretty usable. The Unicone2 is the result of my mini-quest to extend Playstation 2 controllers over long lengths of cat5 cable. A while…