
Tag: Arts & Crafts
-

Ramona Flowers subspace purse
I’m pretty new at this, and this was my biggest sewing project so far. The piping around the edges got kind of messed up in places, but overall I’m happy with the results. Front: Two layers of green denim with heavy interfacing Rear and sides: Two layers of green denim with medium interfacing Strap: Three…
-
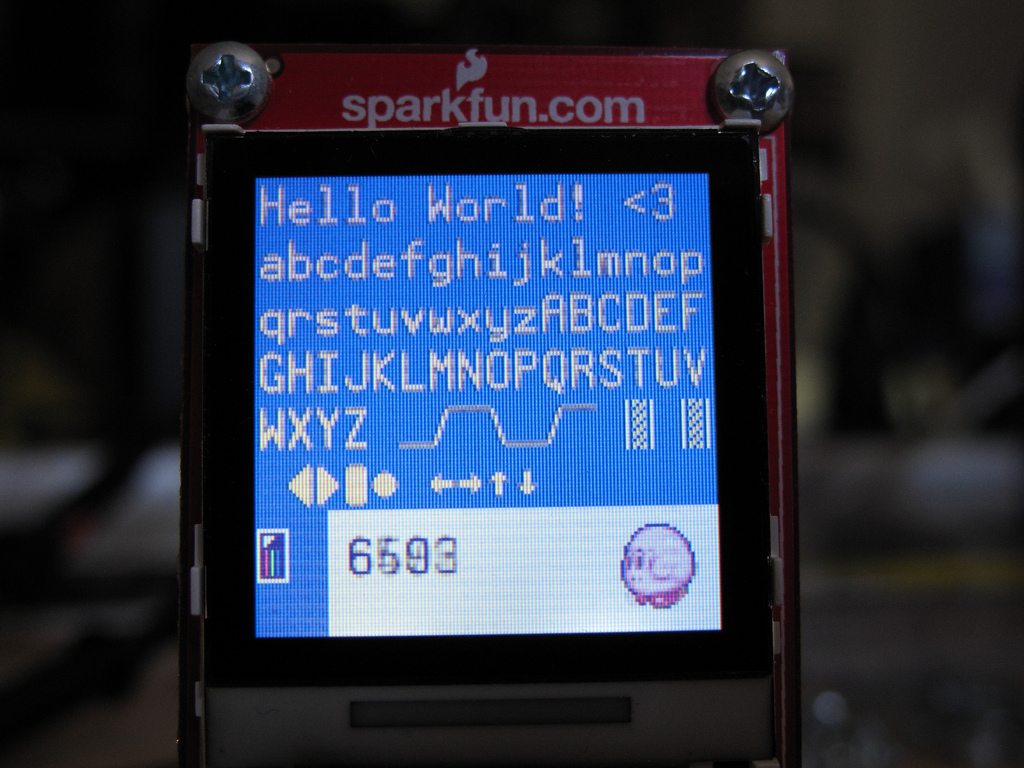
Sewing Machine Update: LCD
I had a rather cute 128×128 Nokia 6100 knockoff LCD that I wanted to use with the project. It’s inexpensive, not a bad quality/price tradeoff, and they’re pretty easy to interface with. Spark Fun already has plenty of drivers on their page for different microcontrollers. But of course, not a Propeller. And after searching through…
-

DIY Sewing Machine Retrofit
The story behind this project is a bit overcomplicated. That’s all below, if you’re interested. I made a video to explain the final product: Back Story This all started when I bought a sewing machine for making fabric RFID tags a little over a year ago, and started using it to make cute plushy objects.…
-

Soft RFID tags and cuddly plushies
This week a new power tool arrived on my desk: How did this happen? It was actually kind of complicated… Months ago, Scott and I dreamed of an automated kegerator. For the workplace, naturally. We’d need some way to hand out credits that coworkers could use in order to dispense beer, so we’d need a…
-

Pinchy scribbles
I bought a Wacom tablet recently.. partly for work, but partly because they’re so rad. I’m definitely no artist, but Paul demanded I post some of my scribbles.