
Tag: analog
-
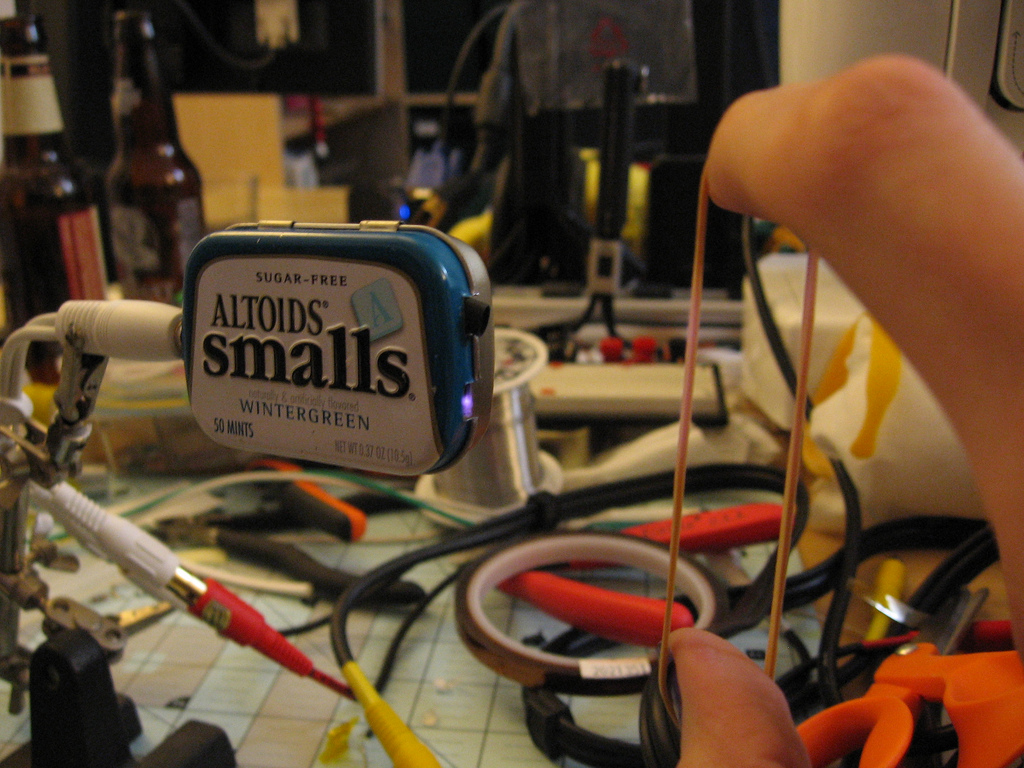
Simple Optical Microphone/Pickup
This is another mini-project that began, like so many have, in a discussion with Scott over some beer. We wanted to build a new kind of speaker amplifier, which used mechanical closed-loop feedback to position the speaker cone exactly where the audio signal says it should be. We figured that, if done right, this could…
-
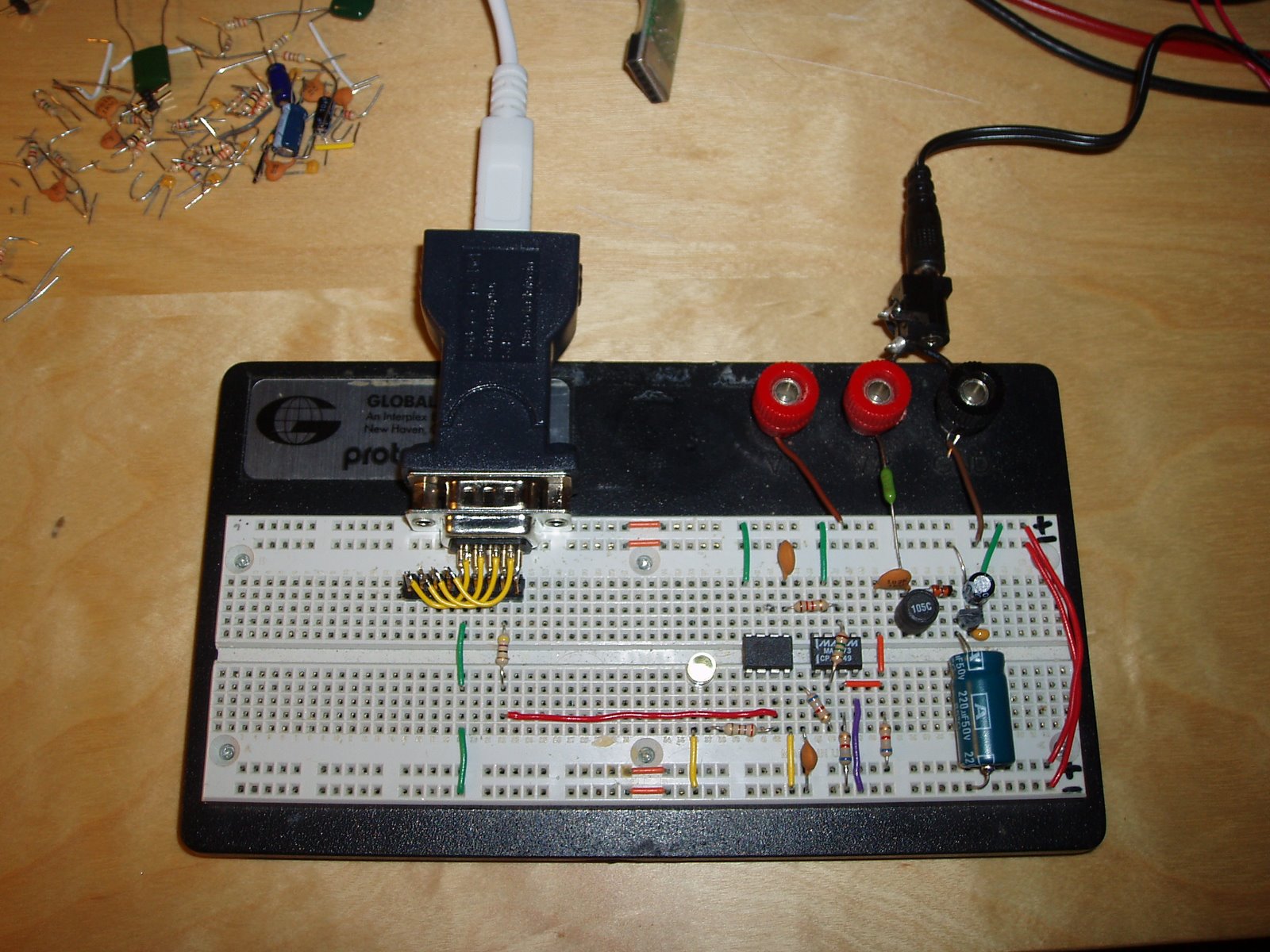
Self-contained TED receiver
My previous entry introduced a homebrew receiver for the powerline-based data protocol used by The Energy Detective. I just designed a second revision of that receiver. This one is self-contained: It gets power and modulated data from a 9V AC wall-wart transformer, and decoded data leaves via an RS-232 serial port at 9600 baud. Best…
-
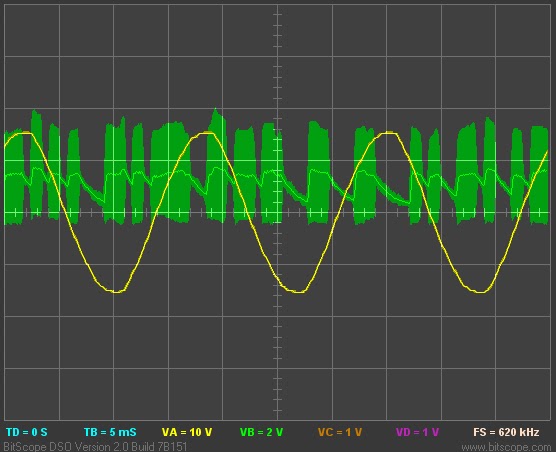
Interfacing with The Energy Detective
I recently bought The Energy Detective (TED), a pretty inexpensive and friendly way to keep tabs on your whole house’s electricity usage. It’s a lot like having a more featureful version of your utility company’s power meter, sitting on your kitchen counter. It can estimate your utility bill, and tell you how much electricity and…
-
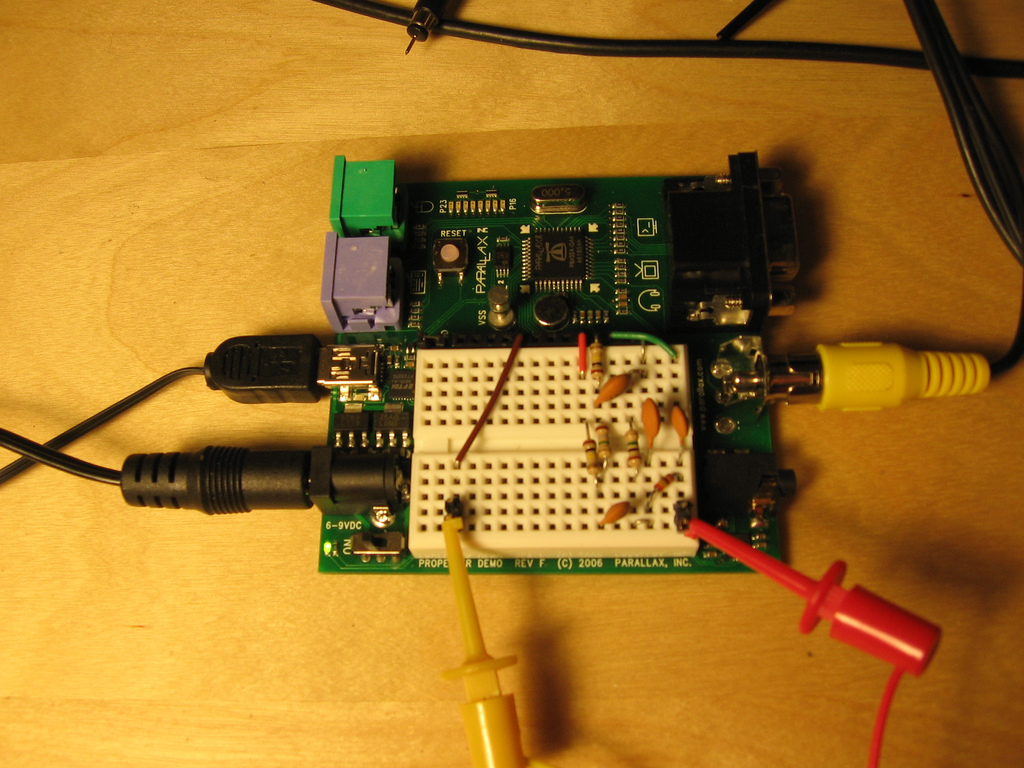
Simplest RFID reader?
That’s a Propeller microcontroller board with a few resistors and capacitors on it. Just add a coil of wire, and you have an RFID reader. Here’s a picture of it scanning my corporate ID badge, and displaying the badge’s 512 bits of content on a portable TV screen: If you’re into that sort of thing,…
-
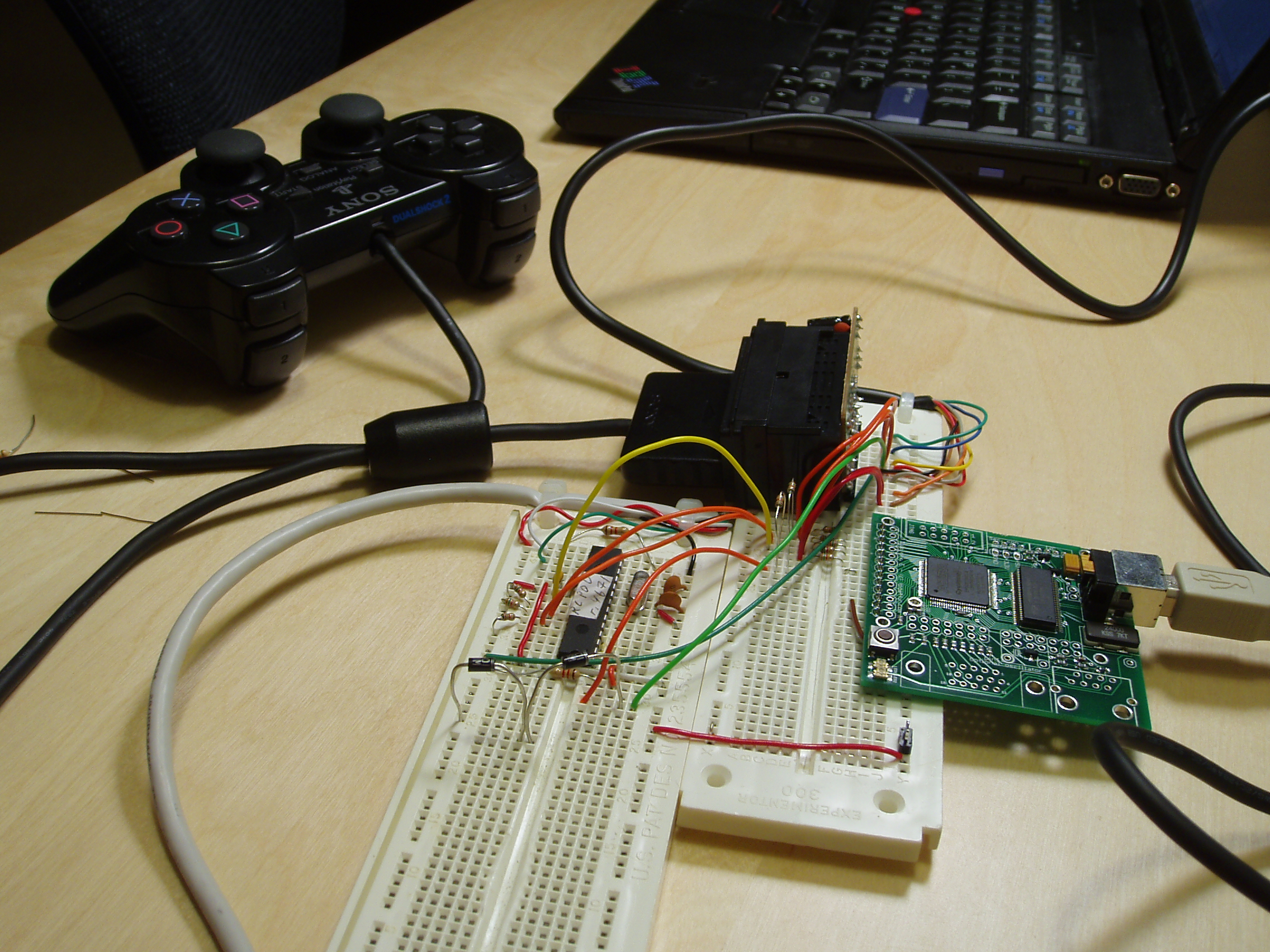
Hardware hackery and the Dual Shock protocol
The hardware-tinkering mood I’ve been in lately shows no sign of subsiding. The theme this time: Everything over cat5. Backing up a bit… It’s summer! Hooray. So, how does one make the most of the season without actually doing something crazy like going outdoors? Of course the answer is to play video games in a…
-

Life at 3.579545 MHz
Well, after an evening of cooking and hacking, I’ve managed to implement my own crazy software-only modulator for NTSC video. It can take an arbitrary JPEG image, turning it into an analog signal representing one field of color broadcast video. This analog signal happens to be playable by displaying a resulting image file on your…
-

Tempest for ATSC
Recently I have become intrigued by the little 75-ohm coax plug on my plasma TV. To me, television programming isn’t worth nearly what Comcast charges for cable. I mostly watch DVDs, or television shows downloaded over the interweb. After reading about the fairly powerful digital television coverage in the bay area, I decided to plonk…