
Tag: Random Hacks
-
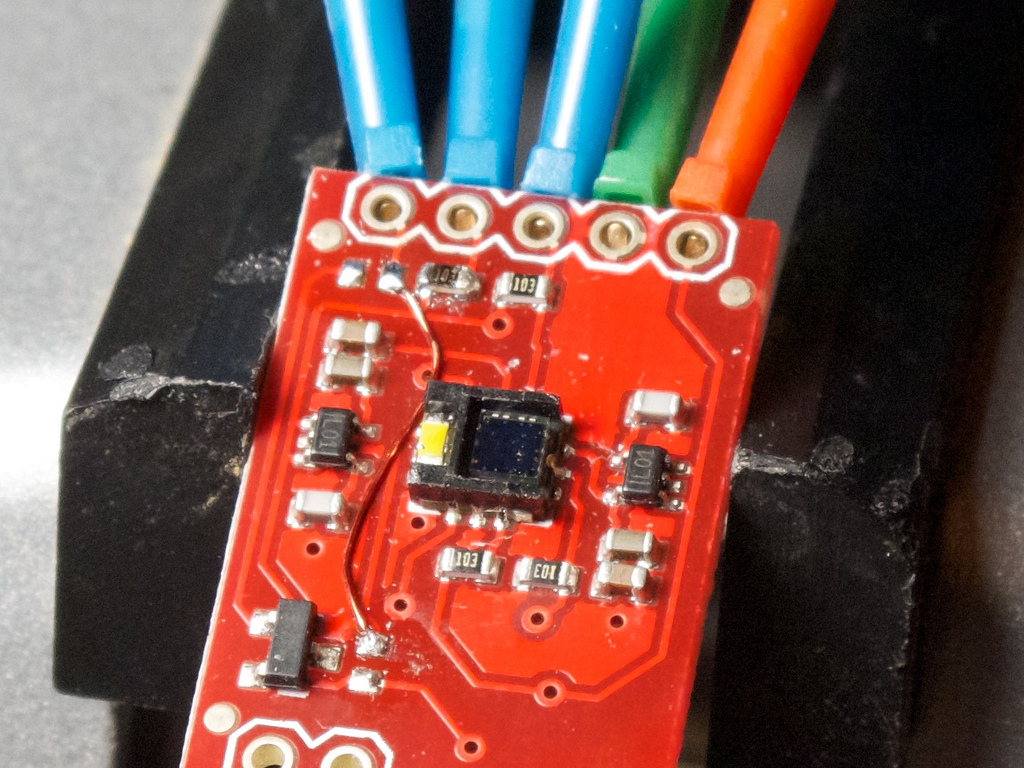
Trying out the Avago ADJD-S371-Q999 Color Sensor
This is another sub-experiment leading up to a project that I’ve only tangentially mentioned on this blog so far: a robot that automatically sorts and places Perler Beads. The robot starts with a pile of unsorted beads, and after it separates them into single beads, it needs a way to accurately sense the color of…
-
Simple Optical Microphone/Pickup
This is another mini-project that began, like so many have, in a discussion with Scott over some beer. We wanted to build a new kind of speaker amplifier, which used mechanical closed-loop feedback to position the speaker cone exactly where the audio signal says it should be. We figured that, if done right, this could…
-

Hacking a Digital Bathroom Scale
People all around the internet have been doing cool things with the Wii peripherals lately, including the Wii Fit balance board. Things like controlling robots or playing World of Warcraft. But what if you just want one weight sensor, not four? The balance board starts to look kind of pricey, and who wants to deal…