
Tag: 3D Printers
-
scanlime:019 / Gimbal SDI Camera Mod
This is a mechanical and electrical modification to the Feiyu Mini3D 3-axis brushless gimbal, so it can hold a Crazyfire HZ-100P SDI camera and LIDAR-Lite distance sensor. Now I can use this small and inexpensive gimbal for the new live streaming cat robot! Please consider supporting me on Patreon so I can keep making these…
-
scanlime:016 / Shiny Blue Vacuum Fluorescent Pole Thing
I’ve been streaming lots of live forward and reverse engineering lately, and I’m about to start editing some of the recent work into a multi-part series of videos! But this little self-contained project had been sitting partially-edited in my queue so long, I had to give it the finish it needed. Here we have a…
-
scanlime:014 / Boldport #2 – Superhero
Finally, another Boldport video! This time a short music video based on the Engineer Superhero kit, assembled in original form and in a variant that includes a coin cell to power the LED and a piezo button to charge the 2N7000 MOSFET gate and make the LED glow for a while. The sound track was…
-

Trying out Skeinforge Support Material
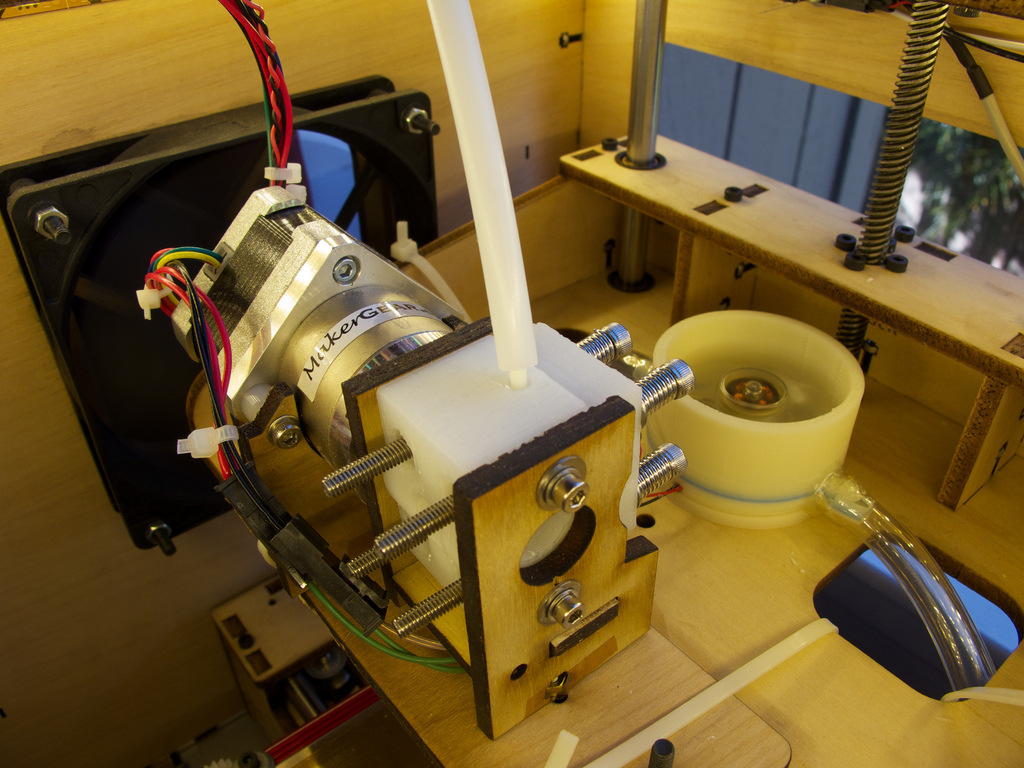
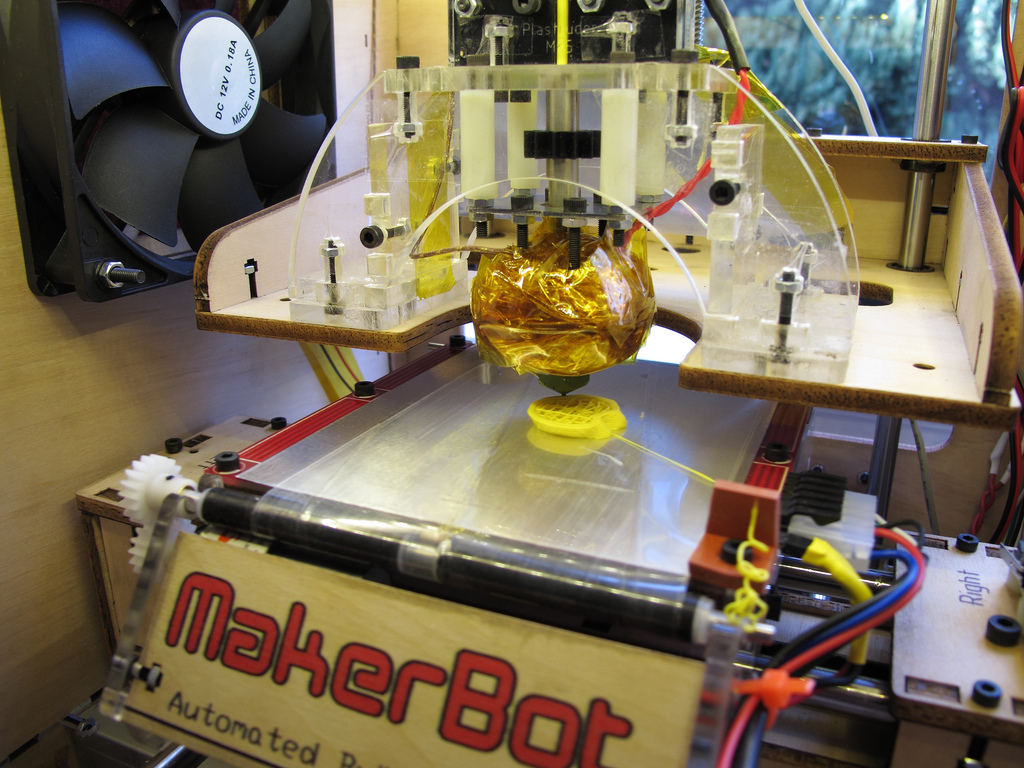
This is a quick photoblog and a video to document my first experience with using the support material options in Skeinforge. This was on my Makerbot Thing-o-Matic with a MakerGear stepper extruder, 0.35mm nozzle, and aluminum/kapton heated build platform. The model I’m printing is Yoshi, the familiar Nintendo character. I cleaned up and subdivided the…
-

MakerBot Protip: Build from SD card without a PC
If you’ve ever wanted to build a model on your MakerBot without a PC attached at all (or perhaps you just never have a USB cable quite long enough to reach…) there’s an easy solution! This is a quick one-line addition to the V2 MakerBot motherboard firmware. With this change, your MakerBot will start up…
-
MakerBot Upgrades
A few add-ons for my MakerBot: New build surface, sheet aluminum and hot Kapton. MakerGear Stepper Extruder, currently using the 0.35mm nozzle Running the latest firmware and ReplicatorG from git, with the MK6 Stepper Plastruder support Using the Skeinforge Reversal plugin. Say goodbye, Comb and Oozebane. Printed around-the-nozzle cooling ring (Video on YouTube)
-
Getting to know the Thing-O-Matic
This post is mostly an apology for not having done anything blog-worthy in the past few months. As usual, life has been full of Things. Like Katamari Damacy. Kinda. On the technical side, I’ve had a few interesting ideas bouncing around in my head lately: 3D Printing. Seems like a space ripe for DIY innovation,…