
Tag: makerbot
-
scanlime050 – Perler Bead Shaker
Briefly looking back at an old project where I tried to push the capabilities of the first 3D printer I had, the Makerbot Thing-o-Matic designed in late 2010. This project from 2011 was intended to be a full printer or sort and place machine for fusible “Perler” style plastic art beads. I got as far…
-
Perler Bead Robot Ideas
This was originally going to be a comment response to Tim’s blog entry, Scanlime’s Perler Bead Hopper Sorting Suggestion: I was looking at Scanlime’s 3D Printed Vibrating Perler Bead Hopper: and I was thinking how best to sort out the different color beads. I thought that if scanlime used one main hopper with the color…
-
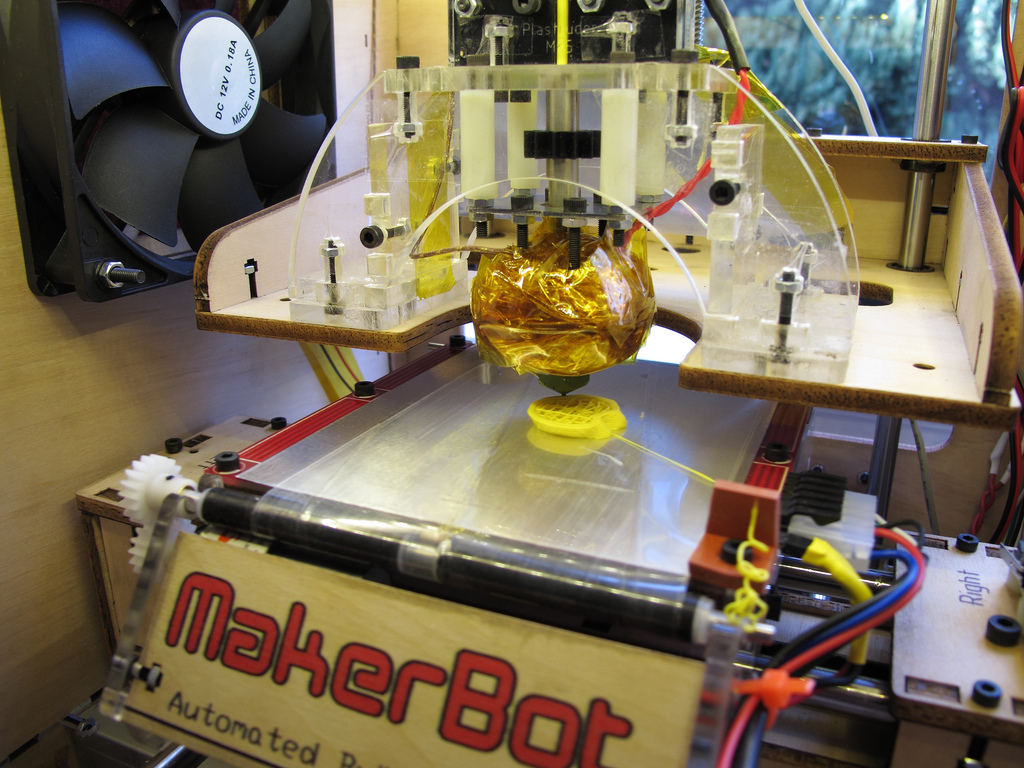
Getting to know the Thing-O-Matic
This post is mostly an apology for not having done anything blog-worthy in the past few months. As usual, life has been full of Things. Like Katamari Damacy. Kinda. On the technical side, I’ve had a few interesting ideas bouncing around in my head lately: 3D Printing. Seems like a space ripe for DIY innovation,…