
Tag: lasers
-

Laser projector update
Looks like my hard disk laser projector made the MAKE blog. Sweet 😉 I’ve been hacking on the software for the projector quite a bit this week- mostly on the code responsible for importing and converting vector graphics data. In a typical laser projector, you have a high-speed DAC connecting a pair of analog servo…
-

Times New Roman at 532 nanometers
After running the ILDA test pattern at only 4K on my hard disk laser scanner, I really wanted to see how well the projector would do with the kinds of “real” vector graphics that I expected to be able to display. Most commercial ILDA frames are way too complicated for it. As I mentioned, the…
-
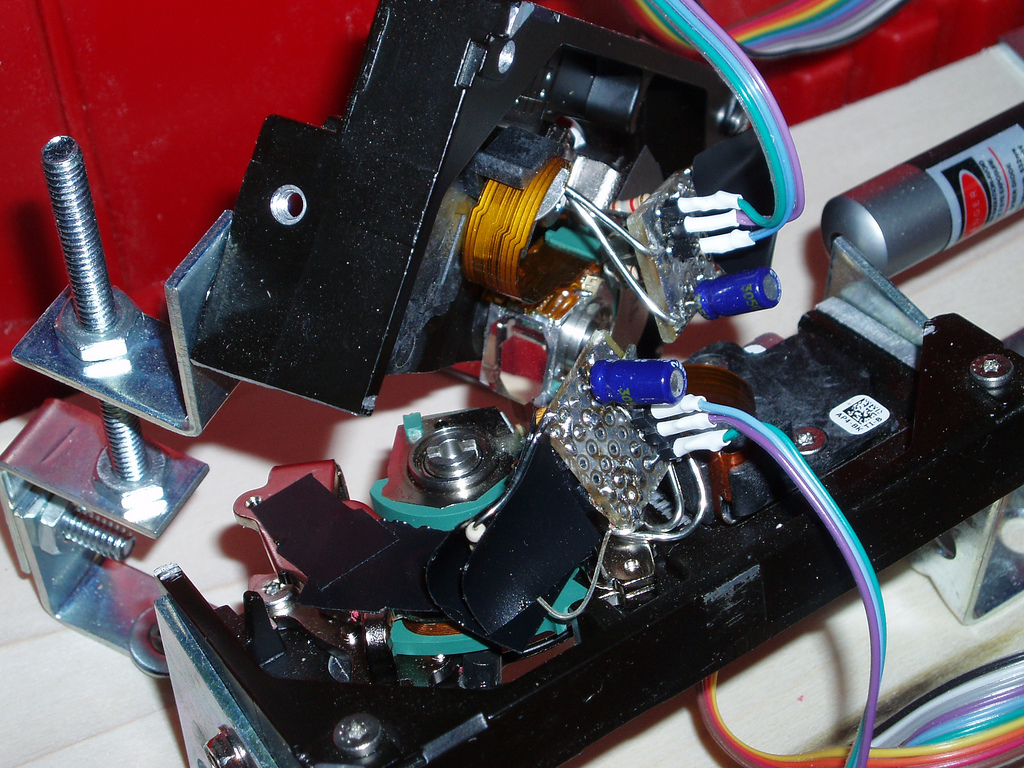
Hard disk laser scanner at ILDA 4K
I should have blogged about this long ago, as I’ve been working on it off and on for about three months now, but today I reached an arbitrary milestone that compels me to post 😉 I’m still actively working on this project, so I’ll try to make updates occasionally, and if I end up putting…