
Tag: bit-banging
-
S/PDIF Digital Audio on a Microcontroller
A few years ago, I implemented an S/PDIF encoder object for the Parallax Propeller. When I first wrote this object, I wrote only a very terse blog post on the subject. I rather like the simplicity and effectiveness of this project, so I thought I’d write a more detailed explanation for anyone who’s curious about…
-

Cube64 GameCube to N64 Adaptor
Enjoy retro N64 games, but can’t stand the controller? That’s the situation I found myself in about 7 years ago, back in 2004. So I built an adaptor, to use Game Cube controllers on the N64. (tl;dr… Cube64-DX on Google Code) The adaptor hardware is very simple- all you need is a PIC microcontroller. I…
-

Propeller Bluetooth Stack Demo
After going months without a lot of time for working on my hobby projects, I finally had a few free days to work on debugging my embedded Bluetooth stack for the Propeller. I got it working well enough to demo a Serial Port Profile device, implemented using only a Propeller Demo Board and a $2…
-

Embedded Bluetooth for $2
This is a continuation of my experiments in bit-banging full-speed USB on the Propeller. I have the basic host controller working reasonably well now, so I started trying to do something a bit more “useful” with it by implementing a simple Bluetooth stack on top of it. Bluetooth and USB are both quite complicated, and…
-
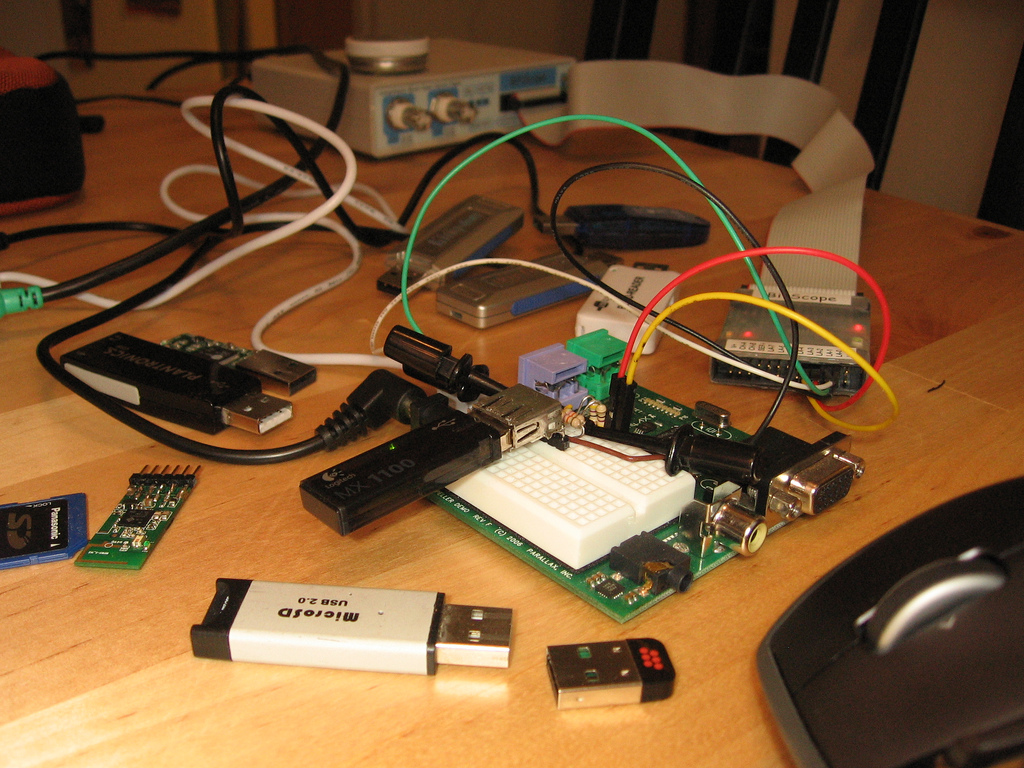
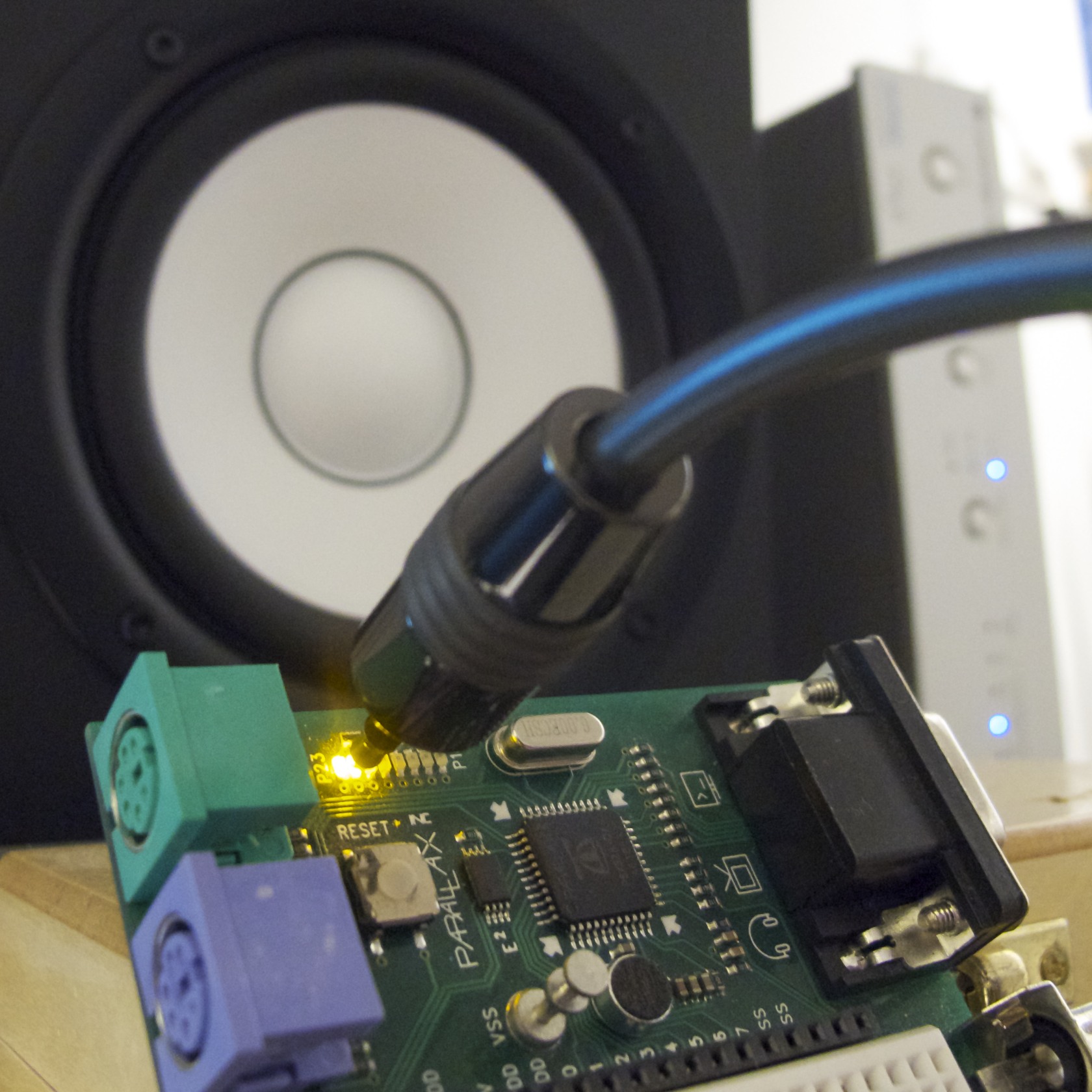
It’s Alive: Bit-banging full-speed USB Host for the Propeller
I’d like to make a more detailed post about this once the project is a bit further along… but for now just a brief description and a couple teaser photos 🙂 This is one of those things that people have said was impossible, and I’ve wanted to try it for a while. I finally found…